Implement diffusion policy models on specialized task using a Franka Panda Arm.
PythonMachine LearningROS2
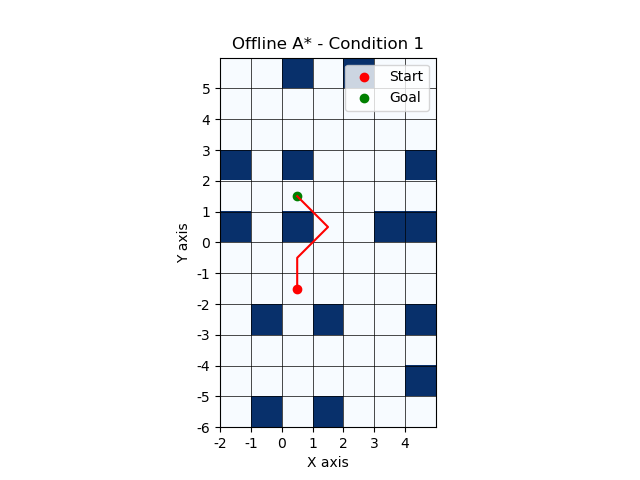
Applying A* Algorithm on Real Robot data
PythonArtificial IntelligenceMobile RobotsSearchPath Planning
Coded a fully connected neural net from scratch.
PythonMachine LearningMobile Robots
Tello drone to autonomously traverse an obstacle course.
PythonOpenCVMachine LearningROS2
Python simulation of a pick and place task using a Kuka youBot.
PythonRobot ManipulationMotion PlanningInverse KinematicsPID ControlScrew TheoryCoppeliaSim
Developed and Implemented novel impedance controller on Franka Panda Arm.
C++libfranka
ROS2 package to autonomously paint using an Emika Franka Panda arm.
ROSPythonMoveItOpenCVApriltagsRobot ManipulationAutonomy
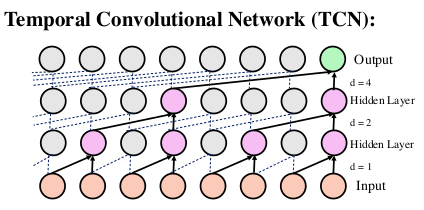
Optimized a Temporal Convolutional Network (TCN) to estimate Whole Body Angular Momentum (WBAM) from wearable sensors
PythonMATLABMachine LearningWearable RoboticsWearable SensorsPyTorch