A* Search Algorithm
While taking Northwestern University’s CS469 Machine Learning and Artificial Intelligence for Robotics class, I was tasked with programming the A* algorithm from scratch.
A* is a search algorithm used to find a path between a given start and end node in a descritized space. The algorithm can operate both offline and online with the major difference between the two lying in the contents of the open set. In this assignment, various combination of conditions were requested including varying grid sizes, online and offline implementations, and motion control of the robot post-planning and simultaneous planning and moving.
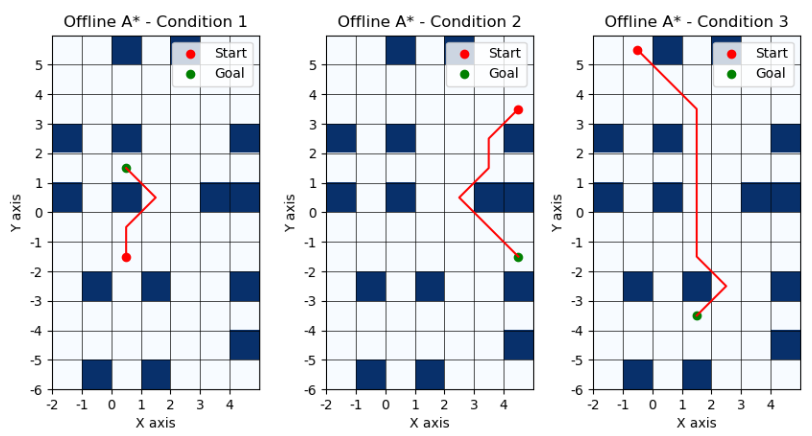
Offline A* Results
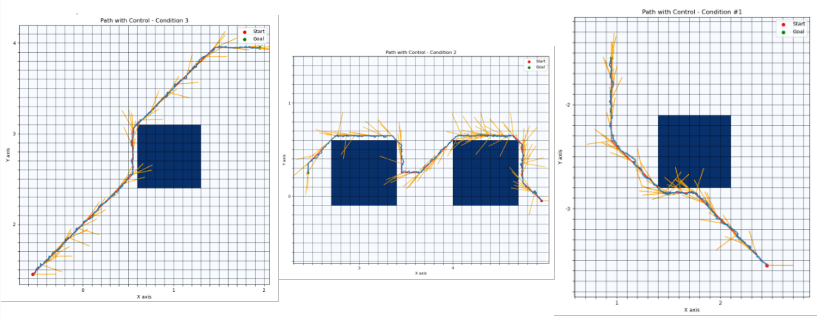
Online A* Simultaneous Path Planning and Motion Contoller